As explained in the previous post, I received new robot design which is under development by Mats Høvin a while ago. While working on a summer-project which is highly related to my master thesis & receiving some tips discussing the new design with some friends*, I came up with some new ideas regarding climbing solutions.
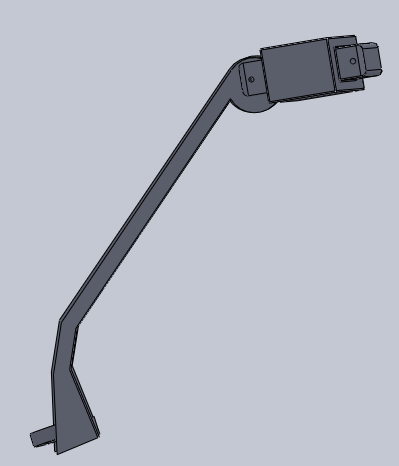
My idea is a very simple grip for each foot which gives the climbing robot the ability to hang on a nail(bolt) on the wall. The curved(bent) part in the middle will be where the robot would grip the nail. I am thinking of using a flex sensor there to receive a signal every time a foot is hanging to a bolt. Meaning if we want to make a move at a time, before moving the foot, we should receive 4 bent resistor signals from the robot feet and while moving, all the way we should be receiving 3 bent resistor signals from other three remaining hanging feet.When we are finished with moving our foot to the new point of griping, we should again receive the 4th signal again ... I am still working on this idea and going to discus it as soon as my supervisor is back from his holiday.
*Thanks to my colleague Tarjei & my friend Magnus :-)
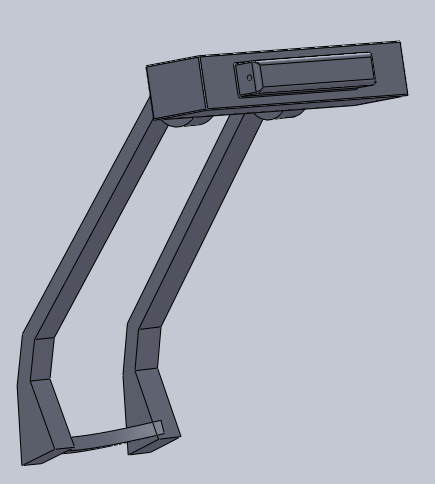
My idea is a very simple grip for each foot which gives the climbing robot the ability to hang on a nail(bolt) on the wall. The curved(bent) part in the middle will be where the robot would grip the nail. I am thinking of using a flex sensor there to receive a signal every time a foot is hanging to a bolt. Meaning if we want to make a move at a time, before moving the foot, we should receive 4 bent resistor signals from the robot feet and while moving, all the way we should be receiving 3 bent resistor signals from other three remaining hanging feet.When we are finished with moving our foot to the new point of griping, we should again receive the 4th signal again ... I am still working on this idea and going to discus it as soon as my supervisor is back from his holiday.
*Thanks to my colleague Tarjei & my friend Magnus :-)


For more snapshots click read more ...


No comments:
Post a Comment