


- First, what could I do? - Second, what could I read? - And third, who could I ask?- Jim Rohn


Advantages | Disadvantages |
High throughput | Device discovery is slow in term of power usage and time |
Resilience against interference | Keeping connections open is expensive in term of power usage |
???????? | ?????????? |








// Wire Master Writer
// by Nicholas Zambetti
// Demonstrates use of the Wire library
// Writes data to an I2C/TWI slave device
// Refer to the "Wire Slave Receiver" example for use with this
// Created 29 March 2006
// This example code is in the public domain.
#include
void setup()
{
Wire.begin(); // join i2c bus (address optional for master)
}
byte x = 0;
void loop()
{
Wire.beginTransmission(4); // transmit to device #4
Wire.send("x is "); // sends five bytes
Wire.send(x); // sends one byte
Wire.endTransmission(); // stop transmitting
x++;
delay(500);
}
// Wire Slave Receiver
// by Nicholas Zambetti
// Demonstrates use of the Wire library
// Receives data as an I2C/TWI slave device
// Refer to the "Wire Master Writer" example for use with this
// Created 29 March 2006
// This example code is in the public domain.
#include
void setup()
{
Wire.begin(4); // join i2c bus with address #4
Wire.onReceive(receiveEvent); // register event
Serial.begin(9600); // start serial for output
}
void loop()
{
delay(100);
}
// function that executes whenever data is received from master
// this function is registered as an event, see setup()
void receiveEvent(int howMany)
{
while(1 < Wire.available()) // loop through all but the last
{
char c = Wire.receive(); // receive byte as a character
Serial.print(c); // print the character
}
int x = Wire.receive(); // receive byte as an integer
Serial.println(x); // print the integer
}





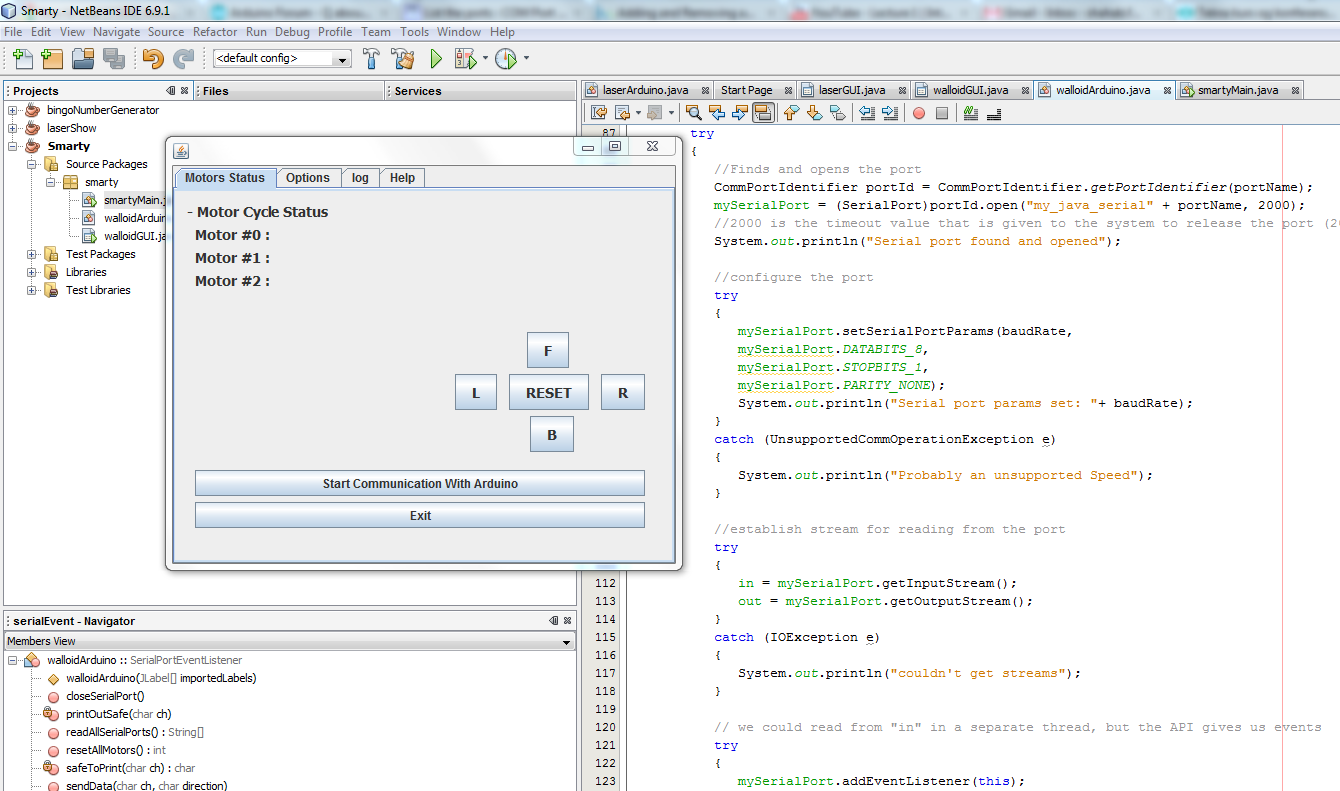
Today I'll be focusing on Positioning of a point and OpenCV(Computer Vision) with Processing. I will start to work on positioning and hope to have my first streaming ready by today or early tomorrow morning(before 7:00 a.m.), as I work usually at nights.


/*
*Differences with previous code :
* 1 - It stops when reaching negative values which result in preventing it to crash with the motor
* 2 - It stops when reaching MAX values which result in preventing the feet to go loose
* 3 - Error protocol ready
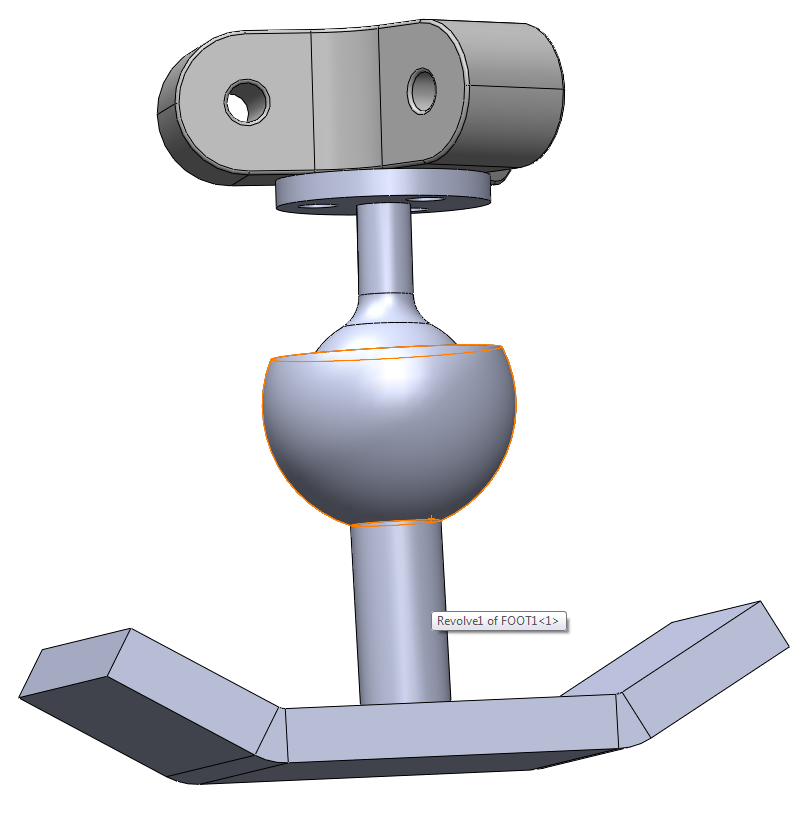
* 4 - Current positioning & Zero positioning in place :-)
*/
#include EEPROM.h
byte pinEncA[] = {3,5,7}; // digital inputs
byte pinEncB[] = {2,4,6}; // digital inputs
// MOTOR OUTPUTS
byte pinDir[] = {13,8,12}; // digital output, controls direction for motor nr. [x]
byte pinPwm[] = {10,11,9}; // analog output, controls motor speed, nr. [x]
//Global variables
int readValue;
int pwmValue;
int motorDir;
//int channelA = 2;
//int channelB = 3;
int cycle[] = {0, 0, 0};
boolean f = false, b = false, r = false, l = false;
int cyclecounter[] = {-1, -1, -1};
int cyclecounterold[] = {-1, -1, -1};
//13 , 10 right, down
//8 , 11 middle, top
//9, 12 left, down
void setup(){
Serial.begin(115200);
//Serial.print("WELCOME TO C1S0");
for (int i=0; i < 3; i++){
pinMode(pinDir[i], OUTPUT);
pinMode(pinPwm[i], OUTPUT);
//in case, just to be sure ...
digitalWrite(pinPwm[i], LOW);
// just in case to be sure
digitalWrite(pinDir[i], LOW);
pinMode(pinEncA[i], INPUT);
pinMode(pinEncB[i], INPUT);
digitalWrite(pinEncA[i], LOW);
digitalWrite(pinEncB[i], LOW);
//cyclecounter[i] = -1;
//cyclecounterold[i] = -1;
}//end of for
//findCurrentPosition();
}//end of setup()
void loop(){
commandCenter();
checkEncoder();
}//end of loop
int value;
void commandCenter(){
//variables
int temp = 0;
if ( Serial.available() > 0 ){
readValue = Serial.read();
//delay(50);
switch (readValue){
case 'h' : //handshake
Serial.print("h");
delay(50);
break;
case 'P' : //handshake
findCurrentPosition();
delay(50);
break;
case '0' ://motor #0
int temp__;
temp__ = 0;
if(Serial.available() < 0)
;
delay(500);
temp__ = Serial.read();
if (temp__ == 102){// -f -> forward
//Serial.print("*** Right forward ***");
digitalWrite(pinDir[0], LOW);
digitalWrite(pinPwm[0], HIGH);
}//end of if
else if(temp__ == 98){// -b -> backward
//Serial.print("*** Right backward ***");
digitalWrite(pinDir[0], HIGH);
digitalWrite(pinPwm[0], HIGH);
}
else{
Serial.println("E00");
//Serial.print(temp__);
}
f = false;
b = false;
l = true;
r = false;
break;
case '1' ://motor #1
int temp_;
if(Serial.available() < 1)
;
delay(500);
temp_ = Serial.read();
if (temp_ == 102){// -f
//Serial.print("*1FW*");
digitalWrite(pinDir[1], LOW);
digitalWrite(pinPwm[1], HIGH);
}//end of if
else if(temp_ == 98){// -b
//Serial.print("*1BW*");
digitalWrite(pinDir[1], HIGH);
digitalWrite(pinPwm[1], HIGH);
}
else{
Serial.println("E00");
//Serial.print(temp_);
}
f = true;
b = false;
l = false;
r = false;
break;
case '2' ://l -> left
temp_ = 0;
if(Serial.available() < 1)
;
delay(500);
temp_ = Serial.read();
if (temp_ == 102){//motor #2
//Serial.print("*2FW*");
digitalWrite(pinDir[2], LOW);
digitalWrite(pinPwm[2], HIGH);
}//end of if
else if(temp_ == 98){// -b
//Serial.print("*2BW*");
digitalWrite(pinDir[2], HIGH);
digitalWrite(pinPwm[2], HIGH);
}
else{
Serial.println("E00");
//Serial.print(temp_);
}
f = false;
b = false;
l = false;
r = true;
break;
case 82 : //R->RESET
Serial.println("R");
resetAll();
f = false;
b = false;
l = false;
r = false;
break;
}//end of switch
}
/*
if (f || b || r || l){
Serial.print("cycle[i]: ");
convertToThreeDigits(cycle[i]);
}//end of if
*/
}//end of commandCenter
//int angleMaalt;
void checkEncoder(){
int A;
int B;
int i;
for (i = 0; i < 3; i++){
cyclecounterold[i] = cyclecounter[i];
A = digitalRead(pinEncA[i]);
B = digitalRead(pinEncB[i]);
if ( (A==LOW) && (B==LOW) )
cyclecounter[i] = 0;
else if ( (A==LOW) && (B==HIGH) )
cyclecounter[i] = 1;
else if ( (A==HIGH) && (B==HIGH) )
cyclecounter[i] = 2;
else if ( (A==HIGH) && (B==LOW) )
cyclecounter[i] = 3;
switch (cyclecounter[i]){
case (0) : {
if ( cyclecounterold[i] == 0){
;//Do nothing
}
else if ( cyclecounterold[i] == 1){
if (cycle[i] + 1 > 213){
criticalSituation(i, 1);
}
else{
cycle[i]++;
saveCurrentPosition();
Serial.print("C");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(cycle[i]);
}
}
else if ( cyclecounterold[i] == 2){
Serial.println("E01");//Error reading from Encoder-
}
else if ( cyclecounterold[i] == 3){
if (cycle[i] -1 < 0){
criticalSituation(i, 0);
}
else{
cycle[i]--;
saveCurrentPosition();
Serial.print("C");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(cycle[i]);
}
}
else
;//Serial.print("ERROR");
break;
}//end of case-0
case (1) : {
if ( cyclecounterold[i] == 0){
if (cycle[i] -1 < 0){
criticalSituation(i, 0);
}
else{
cycle[i]--;
saveCurrentPosition();
Serial.print("C");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(cycle[i]);
}
}
if ( cyclecounterold[i] == 2){
if (cycle[i] + 1 > 213){
criticalSituation(i, 1);
}
else{
cycle[i]++;
saveCurrentPosition();
Serial.print("C");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(cycle[i]);
}
}
else if ( cyclecounterold[i] == 3){
Serial.println("E01");//Error reading from Encoder-
}
else
;//Serial.print("ERROR");
break;
}
case (2) : {
if ( cyclecounterold[i] == 1){
if (cycle[i] -1 < 0){
criticalSituation(i, 0);
}
else{
cycle[i]--;
saveCurrentPosition();
Serial.print("C");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(cycle[i]);
}
}
else if ( cyclecounterold[i] == 2)
;
else if ( cyclecounterold[i] == 3){
if (cycle[i] + 1 > 213){
criticalSituation(i, 1);
}
else{
cycle[i]++;
saveCurrentPosition();
Serial.print("C");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(cycle[i]);
}
}
else if ( cyclecounterold[i] == 0){
Serial.println("E01");//Error reading from Encoder-
}
else
;//Serial.print("ERROR");
break;
}//end of case-2
case(3) : {
if (cyclecounterold[i] == 0){
if (cycle[i] + 1 > 213){
criticalSituation(i, 1);
}
else{
cycle[i]++;
saveCurrentPosition();
Serial.print("C");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(cycle[i]);
}
}
else if (cyclecounterold[i] == 1){
Serial.println("E01");//Error reading from Encoder-
}
else if ( cyclecounterold[i] == 2){
if (cycle[i] -1 < 0){
criticalSituation(i, 0);
}
else{
cycle[i]--;
saveCurrentPosition();
Serial.print("C");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(cycle[i]);
}
}
else if ( cyclecounterold[i] == 3)
;
else
;//Serial.print("ERROR");
break;
}//end of case-3
}
}//end of for
}//end of checkEncoder()
int criticalSituation(int motorNumber, int type){
digitalWrite(pinPwm[motorNumber], LOW);//Setting all PWM's to LOW
if (type == 0)
Serial.println("E02");//*** FATAL ERROR, CRASH POSSIBLE, STOPPING MOTOR ***
else if (type == 1)
Serial.println("E03");//*** FATAL ERROR, ROBOT ARM MIGHT GO LOOSE, STOPPING MOTOR ***
//Serial.print(motorNumber);
return 0;
}//end of criticalSituation
int resetAll(){
for (int i=0; i < 3; i++){
digitalWrite(pinPwm[i], LOW);//Setting all PWM's to LOW
Serial.print("C");
Serial.print(i);
Serial.print("=");
convertToThreeDigits(cycle[i]);
}//end of for
return 0;
}//end of resetAll()
void convertToThreeDigits(int input){
if (input >= 0 && input < 10){
/*switch (input){
case 0 :
Serial.print("00");
break;
case 1 :
Serial.print("01");
break;
case 2 :
Serial.print("02");
break;
case 3 :
Serial.print("03");
break;
case 4 :
Serial.print("04");
break;
case 5 :
Serial.print("05");
break;
case 6 :
Serial.print("06");
break;
case 7 :
Serial.print("07");
break;
case 8 :
Serial.print("08");
break;
case 9 :
Serial.print("09");
break;
default :
Serial.print("00");
break;
}//end of switch
*/
Serial.print("00");
Serial.print(input);
}
else if ( input >= 10 && input < 100){
Serial.print("0");
Serial.print(input);
}
else{
Serial.print(input);
}
}//end of convertToThreeDigits()
void saveCurrentPosition(){
for (int i = 0; i < 3; i++){
EEPROM.write(i, cycle[i]);
}
}//end of saveCurrentPosition
void findCurrentPosition(){
for (int i = 0; i < 3; i++){
value = EEPROM.read(i);
cycle[i] = value;
Serial.print("P");
Serial.print(i);
Serial.print("*");
convertToThreeDigits(value);
}
}//end of findCurrentPosition












#include EEPROM.h
int a = 0;
int value;
void setup()
{
Serial.begin(9600);
for (int i = 0; i < 20; i++){
Serial.println("***");
EEPROM.write(i, i);
}
}
void loop()
{
value = EEPROM.read(a);
Serial.print(a);
Serial.print("\t");
Serial.print(value);
Serial.println("***");
a++;
if (a == 20){
a = 0;
Serial.println("DONE");
delay(5000000);
}
}
//the code is entering saving with Java and we are printing as little as possible in Serial ports
// Encoders inputs
byte pinEncA[] = {7,5,3}; // digital inputs
byte pinEncB[] = {6,4,2}; // digital inputs
// MOTOR OUTPUTS
byte pinDir[] = {13,8,12}; // digital output, controls direction for motor nr. [x]
byte pinPwm[] = {10,11,9}; // analog output, controls motor speed, nr. [x]
//Global variables
int readValue;
int pwmValue;
int motorDir;
//int channelA = 2;
//int channelB = 3;
int cycle[] = {0, 0, 0};
boolean f = false, b = false, r = false, l = false;
int cyclecounter[] = {0, 0, 0};
int cyclecounterold[] = {0, 0, 0};
//13 , 10 right, down
//8 , 11 middle, top
//9, 12 left, down
void setup(){
Serial.begin(115200);
Serial.println("WELCOME TO C1S0");
for (int i=0; i < 3; i++){
pinMode(pinDir[i], OUTPUT);
pinMode(pinPwm[i], OUTPUT);
//in case, just to be sure ...
digitalWrite(pinPwm[i], LOW);
// just in case to be sure
digitalWrite(pinDir[i], LOW);
pinMode(pinEncA[i], INPUT);
pinMode(pinEncB[i], INPUT);
digitalWrite(pinEncA[i], LOW);
digitalWrite(pinEncB[i], LOW);
cyclecounter[i] = -1;
cyclecounterold[i] = -1;
}//end of for
}//end of setup()
void loop(){
commandCenter();
checkEncoder();
}//end of loop
void commandCenter(){
//variables
int temp = 0;
if ( Serial.available() > 0 ){
readValue = Serial.read();
switch (readValue){
case 'h' : //handshake
Serial.println("h");
break;
case '0' ://motor #0
int temp__;
temp__ = 0;
if(Serial.available() < 0)
;
delay(500);
temp__ = Serial.read();
if (temp__ == 102){// -f -> forward
Serial.println("*** Right forward ***");
digitalWrite(pinDir[0], LOW);
digitalWrite(pinPwm[0], HIGH);
}//end of if
else if(temp__ == 98){// -b -> backward
Serial.println("*** Right backward ***");
digitalWrite(pinDir[0], HIGH);
digitalWrite(pinPwm[0], HIGH);
}
else{
Serial.print("error ");
Serial.println(temp__);
}
f = false;
b = false;
l = false;
r = true;
break;
case '1' ://motor #1
int temp_;
if(Serial.available() < 1)
;
delay(500);
temp_ = Serial.read();
if (temp_ == 102){// -f
Serial.println("*1FW*");
digitalWrite(pinDir[1], LOW);
digitalWrite(pinPwm[1], HIGH);
}//end of if
else if(temp_ == 98){// -b
Serial.println("*1BW*");
digitalWrite(pinDir[1], HIGH);
digitalWrite(pinPwm[1], HIGH);
}
else{
Serial.print("error ");
Serial.println(temp_);
}
f = true;
b = false;
l = false;
r = false;
break;
case '2' ://l -> left
temp_ = 0;
if(Serial.available() < 1)
;
delay(500);
temp_ = Serial.read();
if (temp_ == 102){//motor #2
Serial.println("*2FW*");
digitalWrite(pinDir[2], LOW);
digitalWrite(pinPwm[2], HIGH);
}//end of if
else if(temp_ == 98){// -b
Serial.println("*2BW*");
digitalWrite(pinDir[2], HIGH);
digitalWrite(pinPwm[2], HIGH);
}
else{
Serial.print("error ");
Serial.println(temp_);
}
f = false;
b = false;
l = true;
r = false;
break;
case 82 : //R->RESET
Serial.println("*** Resetting ***");
for (int i=0; i < 3; i++){
digitalWrite(pinPwm[i], LOW);//Setting all PWM's to LOW
Serial.print("C");
Serial.print(i);
Serial.print("=");
Serial.println(cycle[i]);
}//end of for
f = false;
b = false;
l = false;
r = false;
break;
}//end of switch
}
/*
if (f || b || r || l){
Serial.print("cycle[i]: ");
Serial.println(cycle[i]);
}//end of if
*/
}//end of commandCenter
//int angleMaalt;
void checkEncoder(){
int A;
int B;
int i;
for (i = 0; i < 3; i++){
A = digitalRead(pinEncA[i]);
B = digitalRead(pinEncB[i]);
if ( (A==LOW) && (B==LOW) )
cyclecounter[i] = 0;
else if ( (A==LOW) && (B==HIGH) )
cyclecounter[i] = 1;
else if ( (A==HIGH) && (B==HIGH) )
cyclecounter[i] = 2;
else if ( (A==HIGH) && (B==LOW) )
cyclecounter[i] = 3;
switch (cyclecounter[i]){
case (0) : {
if ( cyclecounterold[i] == 0){
;//Do nothing
}
else if ( cyclecounterold[i] == 1){
cycle[i]++;
Serial.print("C");
Serial.print(i);
Serial.print("-");
Serial.println(cycle[i]);
}
else if ( cyclecounterold[i] == 2){
Serial.println("Error reading from Encoder-");
}
else if ( cyclecounterold[i] == 3){
cycle[i]--;
Serial.print("C");
Serial.print(i);
Serial.print("-");
Serial.println(cycle[i]);
}
else
;//Serial.print("ERROR");
break;
}//end of case-0
case (1) : {
if ( cyclecounterold[i] == 0){
cycle[i]++;
Serial.print("C");
Serial.print(i);
Serial.print("-");
Serial.println(cycle[i]);
}
if ( cyclecounterold[i] == 2){
cycle[i]--;
Serial.print("C");
Serial.print(i);
Serial.print("-");
Serial.println(cycle[i]);
}
else if ( cyclecounterold[i] == 3){
Serial.println("Error reading from Encoder--");
}
else
;//Serial.print("ERROR");
break;
}
case (2) : {
if ( cyclecounterold[i] == 1){
cycle[i]--;
Serial.print("C");
Serial.print(i);
Serial.print("-");
Serial.println(cycle[i]);
}
else if ( cyclecounterold[i] == 2)
;
else if ( cyclecounterold[i] == 3){
cycle[i]++;
Serial.print("C");
Serial.print(i);
Serial.print("-");
Serial.println(cycle[i]);
}
else if ( cyclecounterold[i] == 0){
Serial.println("Error reading from Encoder---");
}
else
;//Serial.print("ERROR");
break;
}//end of case-2
case(3) : {
if (cyclecounterold[i] == 0){
cycle[i]--;
Serial.print("C");
Serial.print(i);
Serial.print("-");
Serial.println(cycle[i]);
}
else if (cyclecounterold[i] == 1){
Serial.println("Error reading from Encoder----");
}
else if ( cyclecounterold[i] == 2){
cycle[i]++;
Serial.print("C");
Serial.print(i);
Serial.print("-");
Serial.println(cycle[i]);
}
else if ( cyclecounterold[i] == 3)
;
else
;//Serial.print("ERROR");
break;
}//end of case-3
}
cyclecounterold[i] = cyclecounter[i];
}//end of for
}//end of checkEncoder()

"Serial data transmission is slow. The Serial.print statement takes time, which allows time for more data to arrive. You have two choices. Add a delay statement to the while loop, and hope all the data arrives in time is the first choice. The longer you waste time waiting for data, the better your chances of it all arriving in time.
The second choice is to add an end-of-packet marker, and keep appending to temp until that end of packet marker arrives. Only use the data in temp when the end of packet marker has arrived.Source : http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1294185714/1#1
The delay masks the issue of not being able to read a complete packet in one pass. If the delay is too small, the whole packet will not arrive before the delay(s) expire. If the delay is too large, you are just wasting time.
The better approach is to add an end of packet marker to the packer, wo you can read the packet as quickly as possible.."
// Encoders inputs
byte pinEncA[] = {7,5,3}; // digital inputs
byte pinEncB[] = {6,4,2}; // digital inputs
// MOTOR OUTPUTS
byte pinDir[] = {13,8,12}; // digital output, controls direction for motor nr. [x]
byte pinPwm[] = {10,11,9}; // analog output, controls motor speed, nr. [x]
//Global variables
int readValue;
int pwmValue;
int motorDir;
//int channelA = 2;
//int channelB = 3;
int cycle[] = {0, 0, 0};
boolean f = false, b = false, r = false, l = false;
byte cyclecounter[] = {0, 0, 0};
byte cyclecounterold[] = {0, 0, 0};
//13 , 10 right, down
//8 , 11 middle, top
//9, 12 left, down
void setup(){
Serial.begin(9600);
Serial.println("WELCOME TO C1S0");
for (int i=0; i < 3; i++){
pinMode(pinDir[i], OUTPUT);
pinMode(pinPwm[i], OUTPUT);
//in case, just to be sure ...
digitalWrite(pinPwm[i], LOW);
// just in case to be sure
digitalWrite(pinDir[i], LOW);
pinMode(pinEncA[i], INPUT);
pinMode(pinEncB[i], INPUT);
digitalWrite(pinEncA[i], LOW);
digitalWrite(pinEncB[i], LOW);
cyclecounter[i] = 0;
cyclecounterold[i] = 0;
}//end of for
}//end of setup()
void loop(){
commandCenter();
checkEncoder();
}//end of loop
void commandCenter(){
//variables
int temp = 0;
if ( Serial.available() > 0 ){
readValue = Serial.read();
switch (readValue){
case 102 ://f -> forward
Serial.println("*** Forward ***");
digitalWrite(pinDir[1], LOW);
digitalWrite(pinPwm[1], HIGH);
f = true;
b = false;
l = false;
r = false;
break;
case 98 ://b -> back
Serial.println("*** Backward ***");
digitalWrite(pinDir[1], HIGH);
digitalWrite(pinPwm[1], HIGH);
f = false;
b = true;
l = false;
r = false;
break;
case 108 ://l -> left
int temp_;
temp_ = 0;
if(Serial.available() < 1)
;
delay(5);
temp_ = Serial.read();
if (temp_ == 102){// -f
Serial.println("*** Left forward ***");
digitalWrite(pinDir[2], LOW);
digitalWrite(pinPwm[2], HIGH);
}//end of if
else if(temp_ == 98){// -b
Serial.println("*** Left backward ***");
digitalWrite(pinDir[2], HIGH);
digitalWrite(pinPwm[2], HIGH);
}
else Serial.println("*** NOTHING ***");
f = false;
b = false;
l = true;
r = false;
break;
case 114 ://r -> right
int temp__;
temp__ = 0;
if(Serial.available() < 0)
;
delay(5);
temp__ = Serial.read();
if (temp__ == 102){// -f
Serial.println("*** Right forward ***");
digitalWrite(pinDir[0], LOW);
digitalWrite(pinPwm[0], HIGH);
}//end of if
else if(temp__ == 98){// -b
Serial.println("*** Right backward ***");
digitalWrite(pinDir[0], HIGH);
digitalWrite(pinPwm[0], HIGH);
}
f = false;
b = false;
l = false;
r = true;
break;
case 82 : //R->RESET
Serial.println("*** Resetting ***");
for (int i=0; i < 3; i++){
digitalWrite(pinPwm[i], LOW);//Setting all PWM's to LOW
Serial.print("*** Cycle[");
Serial.print(i);
Serial.print("] = ");
Serial.println(cycle[i]);
}//end of for
f = false;
b = false;
l = false;
r = false;
break;
}//end of switch
}
/*
if (f || b || r || l){
Serial.print("cycle[i]: ");
Serial.println(cycle[i]);
}//end of if
*/
}//end of commandCenter
//int angleMaalt;
void checkEncoder(){
int A;
int B;
int i;
for (i = 0; i < 3; i++){
A = digitalRead(pinEncA[i]);
B = digitalRead(pinEncB[i]);
if ( (A==LOW) && (B==LOW) )
cyclecounter[i] = 0;
else if ( (A==LOW) && (B==HIGH) )
cyclecounter[i] = 1;
else if ( (A==HIGH) && (B==HIGH) )
cyclecounter[i] = 2;
else if ( (A==HIGH) && (B==LOW) )
cyclecounter[i] = 3;
if (cyclecounter[i] == 0){
Serial.print("CAME IN AS 0");
if ( cyclecounterold[i] == 0){
Serial.print("Case old is 0");
}
else if ( cyclecounterold[i] == 3){
//angleMaalt++;
Serial.println(cycle[i]);
Serial.print("*** Changed cycle[");
Serial.print(i);
Serial.print("] = ");
cycle[i]--;
Serial.println(cycle[i]);
Serial.println("++++++");
Serial.print("cyccleCounter is : ");
Serial.println(cyclecounter[i]);
Serial.print("cyccleCounterOld is : ");
Serial.println(cyclecounterold[i]);
}
else if ( cyclecounterold[i] == 2){
Serial.println("Error reading from Encoder-");
Serial.println("cyclecounter[i]");
Serial.println(cyclecounter[i]);
Serial.println("cyclecounterold[i]");
Serial.println(cyclecounterold[i]);
}
else Serial.print("CRAP");
}
else if (cyclecounter[i] == 1){
/*if ( cyclecounterold[i] == 2)
angleMaalt--;
else if ( cyclecounterold[i] == 0)
angleMaalt++;
else*/ if ( cyclecounterold[i] == 3){
Serial.println("Error reading from Encoder--");
Serial.println("cyclecounter[i]");
Serial.println(cyclecounter[i]);
Serial.println("cyclecounterold[i]");
Serial.println(cyclecounterold[i]);
}
}
else if (cyclecounter[i] == 2){
/*if ( cyclecounterold[i] == 3)
angleMaalt--;
else if ( cyclecounterold[i] == 1)
angleMaalt++;
else*/ if ( cyclecounterold[i] == 0){
Serial.println("Error reading from Encoder---");
Serial.println("cyclecounter[i]");
Serial.println(cyclecounter[i]);
Serial.println("cyclecounterold[i]");
Serial.println(cyclecounterold[i]);
}
}
else if (cyclecounter[i] == 3){
if (cyclecounterold[i] == 0){
//angleMaalt--;
Serial.println(cycle[i]);
Serial.print("*** Changed cycle[");
Serial.print(i);
Serial.print("] = ");
cycle[i]++;
Serial.println(cycle[i]);
Serial.print("++++++");
Serial.print("cyccleCounter is : ");
Serial.println(cyclecounter[i]);
Serial.print("cyccleCounterOld is : ");
Serial.println(cyclecounterold[i]);
}
/*else if ( cyclecounterold[i] == 2)
angleMaalt++;*/
else if ( cyclecounterold[i] == 1){
Serial.println("Error reading from Encoder----");
Serial.println("cyclecounter[i]");
Serial.println(cyclecounter[i]);
Serial.println("cyclecounterold[i]");
Serial.println(cyclecounterold[i]);
}
}
cyclecounterold[i] = cyclecounter[i];
}//end of for
}//end of checkEncoder()









{kind=link}